UNDINA aims at providing a reliable, compact, plug-and-play communication, networking, and positioning system designed for resource constrained underwater drones.
The solution will be tested over underwater drones that are easily manoeuvrable, light weight, small, and with low associated operational costs.
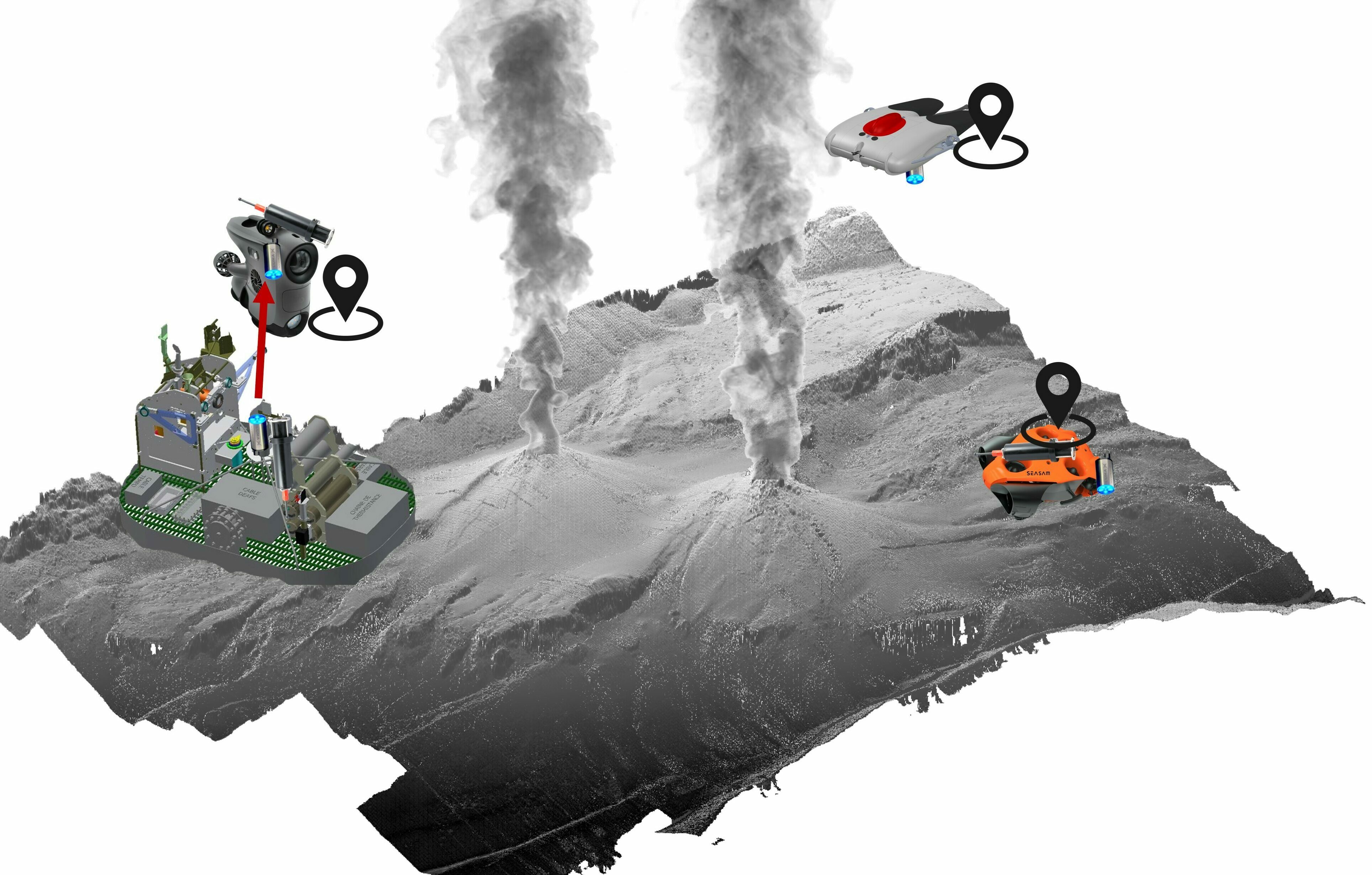
The solutions delivered within the project are an opto-acoustic integrated communication system and a network-based positioning system. The delivered prototypes consist in three underwater drones and two benthic stations with integrated the above systems.
Magnetic inductive plugs with high data rates available through very short range (max 4 cm) WiFi are also integrated in the drones.
These prototypes will demonstrate three on demand services: a) distributed upload of large data collection from remote sensors; b) multi-mobile platform geo-referenced data offload to the benthic station; and c) docking for recharging the drones.
These are relevant use cases of marine robotics in rapidly developing applications where both cabled and wireless remote underwater and seafloor infrastructures are deployed. An example of industrial underwater infrastructures are open-water and coastal fish farming nets, floating wind turbines, and Oil & Gas pipes.
Aquaculture, offshore wind, and petroleum ocean industries, all aim at increasing the amount of autonomous, unmanned operations, and maintenance. This reduces vessel time, man-hours costs, and offshore work Health and Safety risks. In addition, it optimizes value creation in industrial processes.
UNDINA improves communication and positioning capabilities, thus enabling networking solutions for a scalable sensing technology.
Current single technology communication and positioning solutions suffer from local and/or temporal unreliability of the data transfer quality. Being able to rely on different communication technologies, when the distance between transmitter and receiver allows it, makes the communication and positioning system more reliable, robust to space-time varying water conditions, and more accurate than existing solutions.


